Kollege Roboter: Durchbruch in der Robotik-Forschung
Das Forschungsteam des Deutschen Zentrums für Luft- und Raumfahrt hat bedeutende Fortschritte in der KI-Robotik gemacht und einen humanoiden Roboter, Agile Justin, in die Lage versetzt, Objekte auf menschenähnliche Weise zu greifen und zu manipulieren.
Durch die Anwendung von Deep Reinforcement Learning und Sensortechnologie lernt der Roboter selbstständig und erkennt optimale Strategien für die Objektmanipulation.
Dieser Durchbruch hat potenzielle Auswirkungen auf Sektoren wie die industrielle Fertigung und das Gesundheitswesen, indem er die Montage komplexer Teile revolutioniert und die Unabhängigkeit von Menschen mit Behinderungen verbessert.
Der beispiellose Durchbruch in der KI-Robotik
Die jüngsten Fortschritte in der KI-Robotik, insbesondere die Entwicklung von ‘Agile Justin’, einem humanoiden Roboter, der Objekte intuitiv greifen und manipulieren kann, ähnlich wie ein Mensch, stellen einen beispiellosen Durchbruch in diesem Bereich dar. Diese Errungenschaft, ein Produkt der kollektiven Bemühungen eines Teams des Deutschen Zentrums für Luft- und Raumfahrt (DLR), veranschaulicht das immense Potenzial des Lernens künstlicher Intelligenz im Bereich der Robotik.
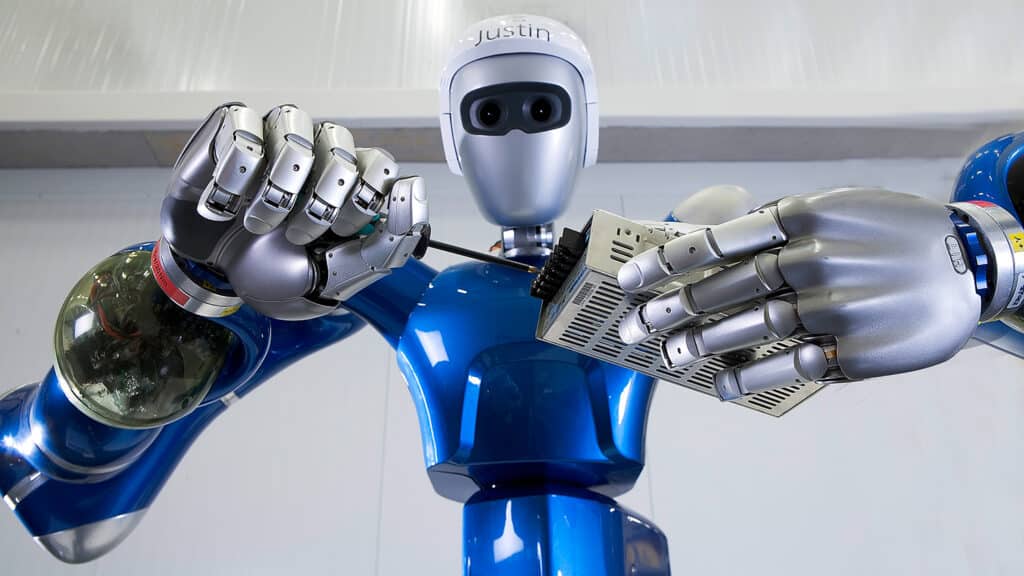
Agile Justin, der humanoide Roboter, ist mit sensorischer Technologie in seinen beiden vierfingrigen Händen ausgestattet, die es ihm ermöglicht, Objekte zu “erfühlen” und mit bemerkenswerter Geschicklichkeit zu manipulieren. Dieser Triumph in der Robotikforschung wurde mit Hilfe neuer Methoden zum Erlernen künstlicher Intelligenz erzielt, die es dem Roboter ermöglichen, Fähigkeiten zu zeigen, die der menschlichen Geschicklichkeit ähneln. Die Herausforderung, Objekte mit der offenen Hand zu manipulieren, eine Aufgabe, die Menschen mühelos ausführen, wurde erfolgreich bewältigt.
Die Forscher setzten Deep Reinforcement Learning ein, wodurch Justin selbständig lernen konnte, was richtig und falsch ist. Es dauerte nur zwei bis drei Stunden maschinellen Lernens in einer Simulation, bis Justin die Aufgabe des Manipulierens von Gegenständen beherrschte. Diese Fähigkeit wurde durch Try und Error erreicht, ähnlich wie beim menschlichen Lernen.
Darüber hinaus kann Justin jetzt mit seiner mehrfingrigen Hand nach beliebigen Objekten greifen – ein Novum in der KI-Robotik. Der Roboter wurde mit Tausenden von Beispielen für Zehntausende von Objekten gefüttert, so dass er intuitiv greifen kann. Diese kalkulierte Kombination aus den neuesten KI-Methoden, modellbasierten methodischen Ansätzen und jahrelanger Erfahrung in der Robotik hat zu einem bedeutenden wissenschaftlichen Durchbruch geführt. Die Anwendungsmöglichkeiten dieser Technologie sind enorm und reichen von der industriellen Fertigung bis hin zum Gesundheitswesen.
Die Rolle von Deep Reinforcement Learning in humanoiden Robotern
Deep Reinforcement Learning spielt bei der Entwicklung von humanoiden Robotern eine zentrale Rolle, da es sie in die Lage versetzt, selbstständig zwischen richtigen und falschen Aktionen zu unterscheiden. Diese Art des Lernens, die auf Versuch-und-Irrtum-Methoden beruht, verleiht Robotern die Fähigkeit, sich selbst zu korrigieren, sich anzupassen und ihre Leistung mit der Zeit zu verbessern.
Im Fall des “Agile Justin“, einem humanoiden Roboter, der vom Deutschen Zentrum für Luft- und Raumfahrt (DLR) entwickelt wurde, wurde tiefes Verstärkungslernen eingesetzt, um den Roboter mit beispielloser Geschicklichkeit auszustatten. Der Roboter kann Objekte greifen, manipulieren und drehen, auch solche, mit denen er zuvor nicht in Berührung gekommen ist, und zwar ohne visuelle Eingabe. Dies wurde durch den Einsatz von Methoden der Künstlichen Intelligenz (KI) erreicht und stellt einen bedeutenden Fortschritt auf dem Gebiet der KI-Robotik dar.
Die Implementierung von Deep Reinforcement Learning in diesem Zusammenhang umfasst maschinelle Lernsitzungen, die etwa zwei bis drei Stunden dauern. Während dieser Sitzungen wird der Roboter darauf programmiert, bestimmte Ergebnisse als positiv oder negativ wahrzunehmen. So wird beispielsweise die erfolgreiche Manipulation eines Objekts in Richtung eines Ziels als positives Ergebnis betrachtet, während das Fallenlassen des Objekts als negativ angesehen wird. Folglich ist der Roboter in der Lage, seine Handlungen auf der Grundlage dieser programmierten Wahrnehmungen zu planen und zu verfeinern.
Dies ist ein Beispiel für das Potenzial von Deep Reinforcement Learning bei der Verbesserung der Fähigkeiten von humanoiden Robotern. Es unterstreicht auch, wie wichtig die Integration von KI-Methoden mit traditionellen, modellbasierten Ansätzen in der Robotik ist. Im Zuge der weiteren Entwicklung der Robotik wird Deep Reinforcement Learning wahrscheinlich eine entscheidende Komponente bei der Entwicklung immer ausgefeilterer und autonomer humanoider Roboter bleiben.
Herausforderungen in der KI-Robotik meistern: Errungenschaften und Entdeckungen
Die Überwindung von Hindernissen in der KI-Robotik hat zu bedeutenden Fortschritten und Entdeckungen geführt, insbesondere auf dem Gebiet der geschickten Manipulation. Ein Team des Deutschen Zentrums für Luft- und Raumfahrt (DLR) hat mit Hilfe von Algorithmen des maschinellen Lernens erfolgreich einen humanoiden Roboter, Agile Justin, mit der Fähigkeit ausgestattet, komplexe Aufgaben wie das Fangen von Bällen und das Erkennen von Materialien allein durch Berührung auszuführen. Diese Technologie wird durch tiefgreifendes Verstärkungslernen unterstützt, durch das Agile Justin selbstständig richtige und falsche Aktionen erkennt und durch Versuch und Irrtum Strategien entwickelt.
Auf der Messe automatica hat Agile Justin kürzlich seine neuen Fähigkeiten unter Beweis gestellt und dabei eine in der Robotik bisher unerreichte Geschicklichkeit gezeigt. Der Roboter war in der Lage, beliebige Objekte zu ergreifen, ohne sie vorher zu kennen – eine Leistung, die durch grundlegende Modelle ermöglicht wurde, die aus 50.000 Beispielen abgeleitet wurden. Dieses Verständnis von 3D-Formen paart sich mit einer optimalen Handposition, die durch die Einstellung von zwölf Fingergelenken bestimmt wird und die menschliche Intuition nachahmt.
Diese Entwicklungen stellen einen Wendepunkt in der KI-Robotik dar, da sie die Manipulation einer Vielzahl von Objekten mit Präzision und Geschwindigkeit ermöglichen. Der Erfolg wurde durch die Integration modernster KI-Methoden und modellbasierter methodischer Ansätze mit umfassender Erfahrung in der Robotik erzielt. Das DLR-Team war in der Lage, diese Modelle auf einfachen Computern zu trainieren, wodurch die Notwendigkeit großer Datencluster umgangen wurde und der Weg für weitere Fortschritte in der industriellen Fertigung und im Gesundheitswesen geebnet wurde.
Künftige Anwendungen dieser Technologie könnten sich auch auf Roboterassistenten in der Pflege erstrecken, die eine wertvolle Unterstützung für Pflegekräfte und eine größere Unabhängigkeit für Menschen mit Behinderungen bieten könnten.

Zukünftige Implikationen: Industrielle Fertigung und Gesundheitswesen
Die zukünftigen Auswirkungen dieser Fortschritte in der KI-Robotik erstrecken sich auf Bereiche wie die industrielle Fertigung und das Gesundheitswesen und könnten diese Sektoren durch die Einführung von Roboterhänden mit mehr Fingern, die komplizierte Teile zusammensetzen können, und von Roboterassistenten, die in der Pflege Unterstützung leisten könnten, revolutionieren.
Im Bereich der industriellen Fertigung bietet die KI-Robotik ein noch nie dagewesenes Maß an Präzision und Effizienz. Roboterhände mit mehr Fingern, die in der Lage sind, selbstständig zu lernen und Objekte zu manipulieren, können potenziell Montagelinien verändern und komplizierte Teile mit menschenähnlicher Geschicklichkeit handhaben.
Darüber hinaus können diese KI-Roboter durch die Anwendung grundlegender Modelle, die aus Tausenden von Beispielen gelernt wurden, die Form von ungesehenen Teilen von Objekten ableiten und so eine Ebene des intuitiven Verständnisses hinzufügen, die in der Robotik bisher nicht möglich war. Diese Fähigkeit reduziert das Fehlerrisiko erheblich und verbessert die Qualität und Geschwindigkeit der Produktion, was eine neue Ära der industriellen Revolution einleiten könnte.
Im Gesundheitswesen könnten diese Fortschritte zur Entwicklung robotischer Pflegeassistenten führen. Dank der ausgefeilten Manipulationsfähigkeiten können solche Roboter sicher mit einer Vielzahl von Haushaltsgegenständen interagieren, eine unschätzbare Unterstützung für das Pflegepersonal darstellen und die Unabhängigkeit von Menschen mit Behinderungen fördern. Das KI-gesteuerte Verständnis von 3D-Formen und die optimale Positionierung der Hände ermöglichen es diesen Robotern, empfindliche Gegenstände wie Tassen und Schüsseln sicher zu handhaben und so eine sichere Interaktion im häuslichen Umfeld zu gewährleisten.
Fazit zu Agile Justin
Zusammenfassend lässt sich sagen, dass die jüngsten Fortschritte in der KI-Robotik, die sich in der Fähigkeit von Agile Justin manifestieren, Objekte intuitiv zu greifen und zu manipulieren, einen bedeutenden Paradigmenwechsel darstellen.
Deep Reinforcement Learning hat sich bei der Überwindung von Herausforderungen in der KI-Robotik als hilfreich erwiesen und zu bahnbrechenden Entdeckungen geführt.
Die potenziellen Auswirkungen dieser Entwicklung auf Sektoren wie die industrielle Fertigung und das Gesundheitswesen könnten die Arbeitsabläufe revolutionieren und die Effizienz steigern. Dies unterstreicht die Bedeutung kontinuierlicher Investitionen und Forschung in diesem Bereich.


